Arduino UNO joystick controller for MeArm® robot with coordinates recording.
Joystick controller for robot arm (meArm®) with recording of coordinates. Allows to repeate recorded coordinates once on button click or repeatedly. Uses Arduino UNO base board without of additional boards. Requires USB connection (2A) or 6 V / 2A power supply. For more info see project:
https://create.arduino.cc/projecthub/utilstudio/joystick-controller-for-mearm-robot-with-record-of-positions-e38629
Project creared by UtilStudio. Feel free to use it for your enjoyment.
https://create.arduino.cc/projecthub/utilstudio/joystick-controller-for-mearm-robot-with-record-of-positions-e38629
Project creared by UtilStudio. Feel free to use it for your enjoyment.
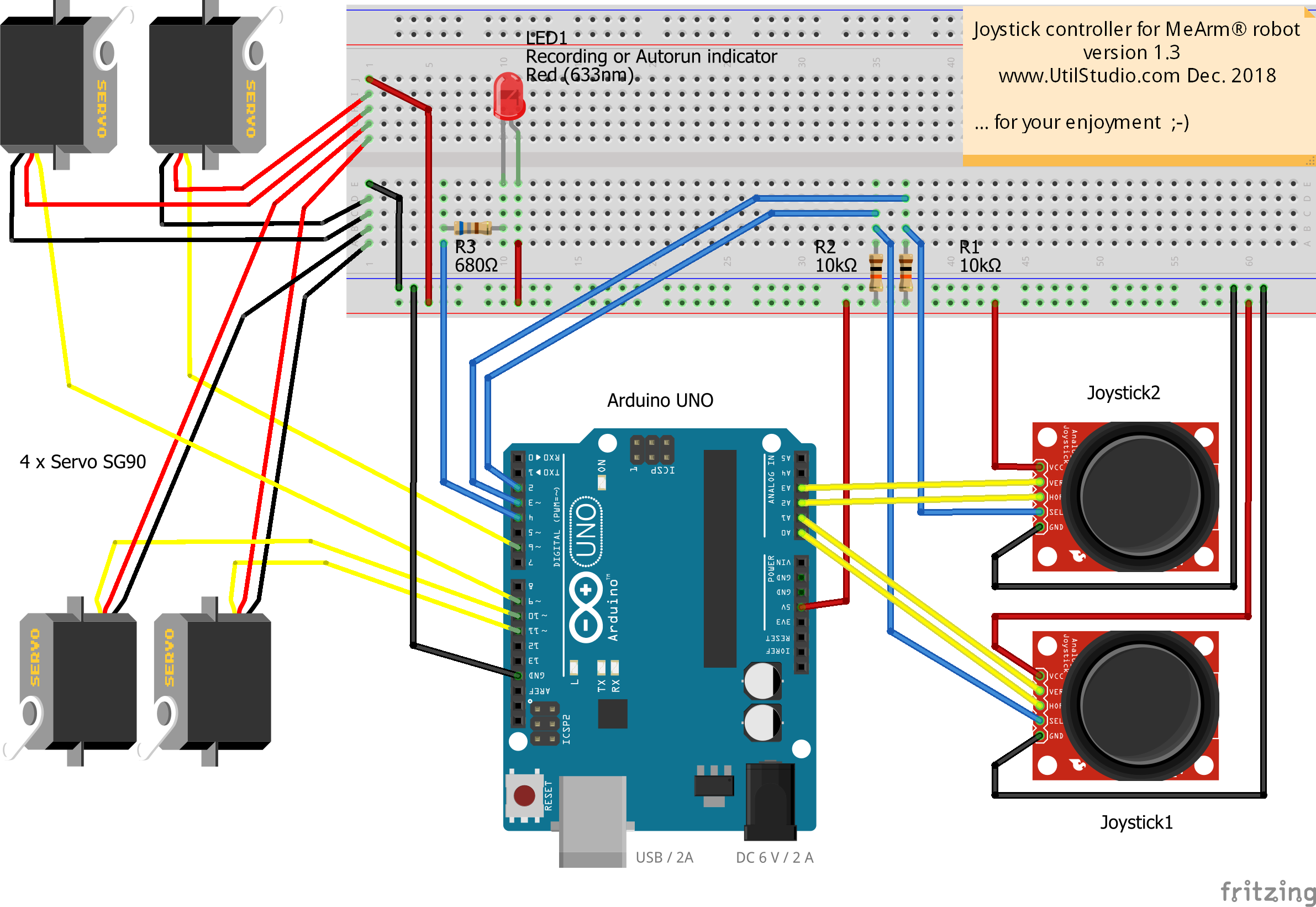
Schematic diagram of Arduino UNO joystick controller for MeArm® robot.
Click on image to view printable image quality.
Source code for Arduino UNO controller board
/* meArm analog joysticks version 1.3 - UtilStudio.com Dec 2018
Uses two analogue joysticks and four servos.
In version 1.3 was improved recording of coordinates.
And changed pins for joystick buttons and LED.
First joystick moves gripper forwards, backwards, left and right,
button start/stop recording positions.
Second joystick moves gripper up, down, and closes and opens,
button start/stop playing recorded positions.
Press button for 2 seconds to autoplay.
Pins:
Arduino Stick1 Stick2 Base Shoulder Elbow Gripper Record/
GND GND GND Brown Brown Brown Brown Auto play
4V VCC VCC Red Red Red Red LED
A0 HOR
A1 VER
PD2 BUTT
A2 HOR
A3 VER
PD3 BUTT
11 Yellow
10 Yellow
9 Yellow
6 Yellow
PD4 X
*/
#include <Servo.h>
bool repeatePlaying = false; /* Repeatedly is running recorded cycle */
int delayBetweenCycles = 2000; /* Delay between cycles */
int basePin = 11; /* Base servo */
int shoulderPin = 10; /* Shoulder servo */
int elbowPin = 9; /* Elbow servo */
int gripperPin = 6; /* Gripper servo */
int xdirPin = 0; /* Base - joystick1*/
int ydirPin = 1; /* Shoulder - joystick1 */
int zdirPin = 3; /* Elbow - joystick2 */
int gdirPin = 2; /* Gripper - joystick2 */
//int pinRecord = A4; /* Button record - backward compatibility */
//int pinPlay = A5; /* Button play - backward compatibility */
int pinRecord = PD2; /* Button record - recommended (A4 is deprecated, will by used for additional joystick) */
int pinPlay = PD3; /* Button play - recommended (A5 is deprecated, will by used for additional joystick) */
int pinLedRecord = PD4; /* LED - indicates recording (light) or auto play mode (blink one) */
const int buffSize = 512; /* Size of recording buffer */
int startBase = 90;
int startShoulder = 90;
int startElbow = 90;
int startGripper = 0;
int posBase = 90;
int posShoulder = 90;
int posElbow = 90;
int posGripper = 0;
int lastBase = 90;
int lastShoulder = 90;
int lastElbow = 90;
int lastGripper = 90;
int minBase = 0;
int maxBase = 150;
int minShoulder = 0;
int maxShoulder = 150;
int minElbow = 0;
int maxElbow = 150;
int minGripper = 0;
int maxGripper = 150;
const int countServo = 4;
int buff[buffSize];
int buffAdd[countServo];
int recPos = 0;
int playPos = 0;
int buttonRecord = HIGH;
int buttonPlay = HIGH;
int buttonRecordLast = LOW;
int buttonPlayLast = LOW;
bool record = false;
bool play = false;
bool debug = false;
String command = "Manual";
int printPos = 0;
int buttonPlayDelay = 20;
int buttonPlayCount = 0;
Servo servoBase;
Servo servoShoulder;
Servo servoElbow;
Servo servoGripper;
void setup() {
Serial.begin(9600);
pinMode(xdirPin, INPUT);
pinMode(ydirPin, INPUT);
pinMode(zdirPin, INPUT);
pinMode(gdirPin, INPUT);
pinMode(pinRecord, INPUT);
pinMode(pinPlay, INPUT);
pinMode(pinLedRecord, OUTPUT);
digitalWrite(pinLedRecord, !record);
servoBase.attach(basePin);
servoShoulder.attach(shoulderPin);
servoElbow.attach(elbowPin);
servoGripper.attach(gripperPin);
StartPosition();
}
void loop() {
buttonRecord = digitalRead(pinRecord);
buttonPlay = digitalRead(pinPlay);
// Serial.print(buttonRecord);
// Serial.print("\t");
// Serial.println(buttonPlay);
// for testing purposes
if (buttonPlay == LOW)
{
buttonPlayCount++;
if (buttonPlayCount >= buttonPlayDelay)
{
repeatePlaying = true;
digitalWrite(pinLedRecord, 0);
delay(250);
digitalWrite(pinLedRecord, 1);
delay(250);
digitalWrite(pinLedRecord, 0);
delay(250);
digitalWrite(pinLedRecord, 1);
}
}
else buttonPlayCount = 0;
if (buttonPlay != buttonPlayLast)
{
record = false;
if (buttonPlay == LOW)
{
play = !play;
if (play)
{
repeatePlaying = false;
StartPosition();
}
}
}
if (buttonRecord != buttonRecordLast)
{
play = false;
if (buttonRecord == LOW)
{
record = !record;
if (record)
{
recPos = 0;
}
else
{
if (debug) PrintBuffer();
}
digitalWrite(pinLedRecord, !record);
}
}
buttonPlayLast = buttonPlay;
buttonRecordLast = buttonRecord;
float dx = map(analogRead(xdirPin), 0, 1023, -5.0, 5.0);
float dy = map(analogRead(ydirPin), 0, 1023, 5.0, -5.0);
float dz = map(analogRead(zdirPin), 0, 1023, 5.0, -5.0);
float dg = map(analogRead(gdirPin), 0, 1023, 5.0, -5.0);
if (abs(dx) < 1.5) dx = 0;
if (abs(dy) < 1.5) dy = 0;
if (abs(dz) < 1.5) dz = 0;
posBase += dx;
posShoulder += dy;
posElbow += dz;
if (play)
{
if (playPos >= recPos) {
playPos = 0;
if (repeatePlaying)
{
delay(delayBetweenCycles);
StartPosition();
}
else
{
play = false;
}
}
bool endOfData = false;
while (!endOfData)
{
if (playPos >= buffSize - 1) break;
if (playPos >= recPos) break;
int data = buff[playPos];
int angle = data & 0xFFF;
int servoNumber = data & 0x3000;
endOfData = data & 0x4000;
switch (servoNumber)
{
case 0x0000:
posBase = angle;
break;
case 0x1000:
posShoulder = angle;
break;
case 0x2000:
posElbow = angle;
break;
case 0x3000:
posGripper = angle;
break;
}
playPos++;
}
}
if (posBase > maxBase) posBase = maxBase;
if (posShoulder > maxShoulder) posShoulder = maxShoulder;
if (posElbow > maxElbow) posElbow = maxElbow;
if (posGripper > maxGripper) posGripper = maxGripper;
if (posBase < minBase) posBase = minBase;
if (posShoulder < minShoulder) posShoulder = minShoulder;
if (posElbow < minElbow) posElbow = minElbow;
if (posGripper < minGripper) posGripper = minGripper;
servoBase.write(posBase);
servoShoulder.write(posShoulder);
servoElbow.write(posElbow);
if (dg < -3.0) {
posGripper = minGripper;
servoGripper.write(posGripper);
}
else if (dg > 3.0) {
posGripper = maxGripper;
servoGripper.write(posGripper);
}
if ((lastBase != posBase) | (lastShoulder != posShoulder) | (lastElbow != posElbow) | (lastGripper != posGripper))
{
if (record)
{
if (recPos < buffSize - countServo)
{
int buffPos = 0;
if (lastBase != posBase)
{
buffAdd[buffPos] = posBase;
buffPos++;
}
if (lastShoulder != posShoulder)
{
buffAdd[buffPos] = posShoulder | 0x1000;
buffPos++;
}
if (lastElbow != posElbow)
{
buffAdd[buffPos] = posElbow | 0x2000;
buffPos++;
}
if (lastGripper != posGripper)
{
buffAdd[buffPos] = posGripper | 0x3000;
buffPos++;
}
buffAdd[buffPos - 1] = buffAdd[buffPos - 1] | 0x4000;
for (int i = 0; i < buffPos; i++)
{
buff[recPos + i] = buffAdd[i];
}
recPos += buffPos;
}
}
command = "Manual";
printPos = 0;
if (play)
{
command = "Play";
printPos = playPos;
}
else if (record)
{
command = "Record";
printPos = recPos;
}
Serial.print(command);
Serial.print("\t");
Serial.print(printPos);
Serial.print("\t");
Serial.print(posBase);
Serial.print("\t");
Serial.print(posShoulder);
Serial.print("\t");
Serial.print(posElbow);
Serial.print("\t");
Serial.print(posGripper);
Serial.print("\t");
Serial.print(record);
Serial.print("\t");
Serial.print(play);
Serial.println();
}
lastBase = posBase;
lastShoulder = posShoulder;
lastElbow = posElbow;
lastGripper = posGripper;
delay(50);
}
void PrintBuffer()
{
for (int i = 0; i < recPos; i++)
{
int data = buff[i];
int angle = data & 0xFFF;
int servoNumber = data & 0x3000;
bool endOfData = data & 0x4000;
Serial.print("Servo=");
Serial.print(servoNumber);
Serial.print("\tAngle=");
Serial.print(angle);
Serial.print("\tEnd=");
Serial.print(endOfData);
Serial.print("\tData=");
Serial.print(data, BIN);
Serial.println();
}
}
void StartPosition()
{
posBase = startBase;
posShoulder = startShoulder;
posElbow = startElbow;
posGripper = startGripper;
servoBase.write(posBase);
servoShoulder.write(posShoulder);
servoElbow.write(posElbow);
servoGripper.write(posGripper);
}